math notes for class 12 vector algebra chapter 10: download pdf , vector algebra 12 notes, class 12 maths notes, vector algebra class 12, vector algebra class 12 notes, class 12 vector algebra, note maths, maths notes, vector algebra, class 12 cmaths chapter 10 notes, 12th standard maths notes, 12th std maths notes, class 12 maths notes chapter 10, vector algebra chapter class 12 notes
A vector has direction and magnitude both but scalar has only magnitude.
Magnitude of a vector a is denoted by |a| or a. It is non-negative scalar.
Two vectors a and b are said to be equal written as a = b, if they have (i) same length (ii) the same or parallel support and (iii) the same sense.
A vector whose initial and terminal points are coincident is called zero or null vector. It is denoted by 0.
A vector whose magnitude is unity is called a unit vector which is denoted by nˆ
If the initial point of a vector is not specified, then it is said to be a free vector.
A vector having the same magnitude as that of a given vector a and the direction opposite to that of a is called the negative of a and it is denoted by —a.
Vectors are said to be like when they have the same direction and unlike when they have opposite direction.
Vectors having the same or parallel supports are called collinear vectors.
Vectors having same initial point are called coinitial vectors.
Vectors having the same terminal point are called coterminous vectors.
A vector which is drawn parallel to a given vector through a specified point in space is called localized vector.
A system of vectors is said to be coplanar, if their supports are parallel to the same plane. Otherwise they are called non-coplanar vectors.
A vector having the same direction as that of a given vector but magnitude equal to the reciprocal of the given vector is known as the reciprocal of a. i.e., if |a| = a, then |a-1| = 1 / a.
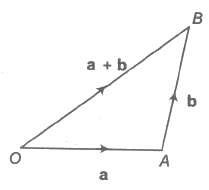
Let a and b be any two vectors. From the terminal point of a, vector b is drawn. Then, the vector from the initial point O of a to the terminal point B of b is called the sum of vectors a and b and is denoted by a + b. This is called the triangle law of addition of vectors.
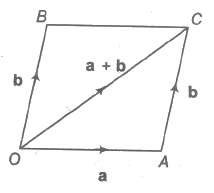
Let a and b be any two vectors. From the initial point of a, vector b is drawn and parallelogram OACB is completed with OA and OB as adjacent sides. The vector OC is efined as the sum of a and b. This is called the parallelogram law of addition of vectors.
The sum of two vectors is also called their resultant and the process of addition as composition.
(i) a + b = b + a (commutativity)
(ii) a + (b + c)= (a + b)+ c (associativity)
(iii) a+ O = a (additive identity)
(iv) a + (— a) = 0 (additive inverse)
(v) (k1 + k2) a = k1 a + k2a (multiplication by scalars)
(vi) k(a + b) = k a + k b (multiplication by scalars)
(vii) |a+ b| ≤ |a| + |b| and |a – b| ≥ |a| – |b|
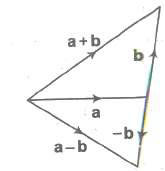
If a and b be any two vectors, then their difference a – b is defined as a + (- b).
Let a be a given vector and λ be a scalar. Then, the product of the vector a by the scalar λ is λ a and is called the multiplication of vector by the scalar.
(i) |λ a| = |λ| |a|
(ii) λ O = O
(iii) m (-a) = – ma = – (m a)
(iv) (-m) (-a) = m a
(v) m (n a) = mn a = n(m a)
(vi) (m + n)a = m a+ n a
(vii) m (a+b) = m a + m b
Let P1 (x1, y1, z1) and P2 (x2, y2, z2) are any two points, then the vector joining P1 and P2 is the vector P1 P2.
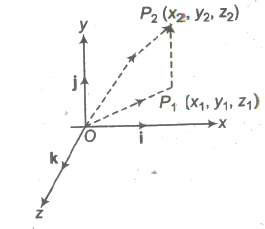
The component vectors of P and Q are
OP = x1i + y1j + z1k and OQ = x2i + y2j + z2k
i.e., P1 P2 = (x2i + y2j + z2k) – (x1i + y1j + z1k)
= (x2 – x1) i + (y2 – y1) j + (z2 – z1) k
Its magnitude is P1 P2 = √(x2 – x1)2 + (y2 – y1)2 + (z2 – z1)2
The position vector of a point P with respect to a fixed point, say O, is the vector OP. The fixed
point is called the origin.
Let PQ be any vector. We have PQ = PO + OQ = — OP + OQ = OQ — OP = Position vector
of Q — Position vector of P.
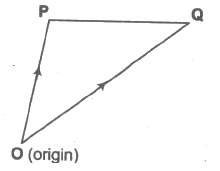
i.e., PQ = PV of Q — PV of P
Vectors a and b are collinear, if a = λb, for some non-zero scalar λ.
Let A, B, C be any three points.
Points A, B, C are collinear <=> AB, BC are collinear vectors.
<=> AB = λBC for some non-zero scalar λ.
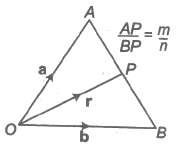
Let A and B be two points with position vectors a and b, respectively and OP= r.
(i) Let P be a point dividing AB internally in the ratio m : n. Then,
r = m b + n a / m + n
Also, (m + n) OP = m OB + n OA
(ii) The position vector of the mid-point of a and b is a + b / 2.
(iii) Let P be a point dividing AB externally in the ratio m : n. Then, r = m b + n a / m + n
(i) If a, b, c be PV’s of the vertices A, B, C of a ΔABC respectively, then the PV of the centroid
G of the triangle is a + b + c / 3.
(ii) The PV of incentre of ΔABC is (BC)a + (CA)b + (AB)c / BC + CA + AB
(iii) The PV of orthocentre of ΔABC is
a(tan A) + b(tan B) + c(tan C) / tan A + tan B + tan C
If a and b are two non-zero vectors, then the scalar or dot product of a and b is denoted by a * b and is defined as a * b = |a| |b| cos θ, where θ is the angle between the two vectors and 0 < θ < π .
(i) The angle between two vectors a and b is defined as the smaller angle θ between them,
when they are drawn with the same initial point. Usually, we take 0 < θ < π.Angle between two like vectors is O and angle between two unlike
vectors is π .
(ii) If either a or b is the null vector, then scalar product of the vector is zero.
(iii) If a and b are two unit vectors, then a * b = cos θ.
(iv) The scalar product is commutative i.e., a * b= b * a
(v) If i , j and k are mutually perpendicular unit vectors i , j and k, then
i * i = j * j = k * k =1 and i * j = j * k = k * i = 0
(vi) The scalar product of vectors is distributive over vector addition.
(a) a * (b + c) = a * b + a * c (left distributive)
(b) (b + c) * a = b * a + c * a (right distributive)
Note Length of a vector as a scalar product If a be any vector, then the scalar product a * a = |a| |a| cosθ ⇒ |a|2 = a2 ⇒ a = |a| Condition of perpendicularity a * b = 0 <=> a ⊥ b, a and b being non-zero vectors.
(i) (a + b) * (a – b) = |a|22 – |b|2
(ii) |a + b|2 = |a|22 + |b|2 + 2 (a * b)
(iii) |a – b|2 = |a|22 + |b|2 – 2 (a * b)
(iv) |a + b|2 + |a – b|2 = (|a|22 + |b|2) and |a + b|2 – |a – b|2 = 4 (a * b)
or a * b = 1 / 4 [ |a + b|2 – |a – b|2 ]
(v) If |a + b| = |a| + |b|, then a is parallel to b.
(vi) If |a + b| = |a| – |b|, then a is parallel to b.
(vii) (a * b)2 ≤ |a|22 |b|2
(viii) If a = a1i + a2j + a3k, then |a|2 = a * a = a12 + a2
2 + a3
2 Or |a| = √a1 2 + a2
2 + a3
2
(ix) Angle between Two Vectors
If θ is angle between two non-zero vectors, a, b, then we
have
a * b = |a| |b| cos θ cos θ = a * b / |a| |b| If a = a1i + a2j + a3k and b = b1i + b2j + b3k
Then, the angle θ between a and b is given by cos θ = a * b / |a| |b| = a1b1 + a2b2 + a3b3 / √a1
2 + a2
2 + a3
2 √b1
2 + b2
2 + b3
2
(x) Projection and Component of a Vector
Projection of a on b = a * b / |a|
Projection of b on a = a * b / |a|
Vector component of a vector a on b
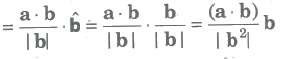
Similarly, the vector component of b on a = ((a * b) / |a2|) * a
The work done by a force is a scalar quantity equal to the product of the magnitude of the force and the resolved part of the displacement.
∴ F * S = dot products of force and displacement.
Suppose F1, F1,…, Fn are n forces acted on a particle, then during the displacement S of the particle, the separate forces do quantities of work F1 * S, F2 * S, Fn * S.

Here, system of forces were replaced by its resultant R.
The vector product of the vectors a and b is denoted by a * b and it is defined as
a * b = (|a| |b| sin θ) n = ab sin θ n …..(i)
where, a = |a|, b= |b|, θ is the angle between the vectors a and b and n is a unit vector which is perpendicular to both a and b, such that a, b and n form a right-handed triad of vectors.
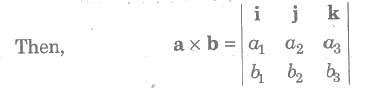
(i) Let a = a1i + a2j + a3k and b = b1i + b2j + b3k
(ii) If a = b or if a is parallel to b, then sin θ = 0 and so a * b = 0.
(iii) The direction of a * b is regarded positive, if the rotation from a to b appears to be anticlockwise.
(iv) a * b is perpendicular to the plane, which contains both a and b. Thus, the unit vector perpendicular to both a and b or to the plane containing is given by n = a * b / |a * b| = a * b /
ab sin θ
(v) Vector product of two parallel or collinear vectors is zero.
(vi) If a * b = 0, then a = O or b = 0 or a and b are parallel on collinear.
(vii) Vector Product of Two Perpendicular Vectors If θ = 900, then sin θ = 1, i.e. , a * b = (ab)n or |a * b| = |ab n| = ab
(viii) Vector Product of Two Unit Vectors
If a and b are unit vectors, then
a = |a| = 1, b = |b| = 1
∴ a * b = ab sin θ n = (sin theta;).n
(ix) Vector Product is not Commutative
The two vector products a * b and b * a are equal in
magnitude but opposite in direction.
i.e., b * a =- a * b ……..(i)
(x) The vector product of a vector a with itself is null vector, i. e., a * a= 0.
(xi) Distributive Law For any three vectors a, b, c a * (b + c) = (a * b) + (a * c)
(xii) Area of a Triangle and Parallelogram
(a) The vector area of a ΔABC is equal to 1 / 2 |AB * AC| or 1 / 2 |BC * BA| or 1 / 2 |CB *
CA|.
(b) The area of a ΔABC with vertices having PV’s a, b, c respectively, is 1 / 2 |a * b + b * c + c
* a|.
(c) The points whose PV’s are a, b, c are collinear, if and only if a * b + b * c + c * a
(d) The area of a parallelogram with adjacent sides a and b is |a * b|.
(e) The area of a Parallelogram with diagonals a and b is 1 / 2 |a * b|.
(f) The area of a quadrilateral ABCD is equal to 1 / 2 |AC * BD|.
(xiii) Vector Moment of a Force about a Point
The vector moment of torque M of a force F about the point O is the vector whose magnitude is equal to the product of |F| and the perpendicular distance of the point O from the line of action of F.
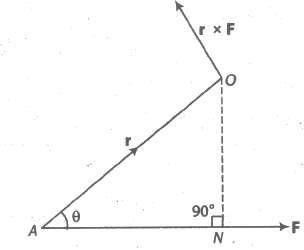
∴ M = r * F
where, r is the position vector of A referred to O.
(a) The moment of force F about O is independent of the choice of point A on the line of action
of F.
(b) If several forces are acting through the same point A, then the vector sum of the moments of the separate forces about a point O is equal to the moment of their resultant force about O.
(xiv) The Moment of a Force about a Line
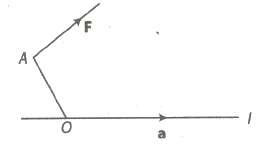
Let F be a force acting at a point A, O be any point on the given line L and a be the unit vector
along the line, then moment of F about the line L is a scalar given by (OA x F) * a
(xv) Moment of a Couple
(a) Two equal and unlike parallel forces whose lines of action are different are said to constitute a couple.
(b) Let P and Q be any two points on the lines of action of the forces – F and F, respectively.
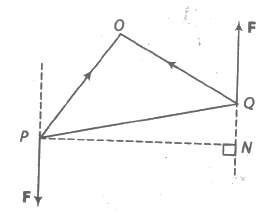
The moment of the couple = PQ x F
If a, b, c are three vectors, then (a * b) * c is called scalar triple product and is denoted by [a b
c].
∴ [a b c] = (a * b) * c
The scalar triple product (a * b) * c represents the volume of a parallelepiped whose coterminous edges are represented by a, b and c which form a right handed system of vectors.
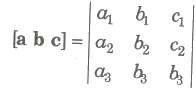
Expression of the scalar triple product (a * b) * c in terms of components
a = a1i + a1j + a1k, b = a2i + a2j + a2k, c = a3i + a3j + a3k is
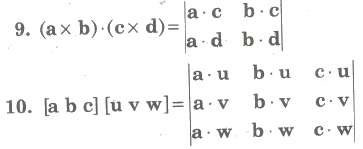
1. The scalar triple product is independent of the positions of dot and cross i.e., (a * b) * c = a * (b * c).
2. The scalar triple product of three vectors is unaltered so long as the cyclic order of the vectors remains unchanged.
i.e., (a * b) * c = (b * c) * a= (c * a) * b or [a b c] = [b c a] = [c a b]
.3. The scalar triple product changes in sign but not in magnitude, when the cyclic order is changed.
i.e., [a b c] = – [a c b] etc.
4. The scalar triple product vanishes, if any two of its vectors are equal.
i.e., [a a b] = 0, [a b a] = 0 and [b a a] = 0.
5. The scalar triple product vanishes, if any two of its vectors are parallel or collinear.
6. For any scalar x, [x a b c] = x [a b c]. Also, [x a yb zc] = xyz [a b c].
7. For any vectors a, b, c, d, [a + b c d] = [a c d] + [b c d]
8. [i j k] = 1
11. Three non-zero vectors a, b and c are coplanar, if and only if [a b c] = 0.
12. Four points A, B, C, D with position vectors a, b, c, d respectively are coplanar, if and only
if [AB AC AD] = 0.
i.e., if and only if [b — a c— a d— a] = 0.
13. Volume of parallelepiped with three coterminous edges a, b,c is | [a b c] |.
14. Volume of prism on a triangular base with three coterminous edges a,b,c is 1/2 | [a b c] |.
15. Volume of a tetrahedron with three coterminous edges a, b,c is 1 / 6 | [a b c] |.
16. If a, b, c and d are position vectors of vertices of a tetrahedron, then Volume = 1 / 6 [b — a c — a d — a].
If a, b, c be any three vectors, then (a * b) * c and a * (b * c) are known as vector triple product.
∴ a * (b * c)= (a * c)b — (a * b) c and (a * b) * c = (a * c)b — (b * c) a
(i) The vector r = a * (b * c) is perpendicular to a and lies in the plane b and c.
(ii) a * (b * c) ≠ (a * b) * c, the cross product of vectors is not associative.
(iii) a * (b * c)= (a * b) * c, if and only if and only if (a * c)b — (a * b) c = (a * c)b — (b * c) a, if and only if c = (b * c) / (a * b) * a Or if and only if vectors a and c are collinear.
Let a, b and c be three non-coplanar vectors and let a’ = b * c / [a b c], b’ = c * a / [a b c], c’ = a * b / [a b c]
Then, a’, b’ and c’ are said to form a reciprocal system of a, b and c.
(i) a * a’ = b * b’= c * c’ = 1
(ii) a * b’= a * c’ = 0, b * a’ = b * c’ = 0, c * a’ = c * b’= 0
(iii) [a’, b’, c’] [a b c] = 1 ⇒ [a’ b’ c’] = 1 / [a b c]
(iv) a = b’ * c’ / [a’, b’, c’], b = c’ * a’ / [a’, b’, c’], c = a’ * b’ / [a’, b’, c’]
Thus, a, b, c is reciprocal to the system a’, b’ ,c’.
(v) The orthonormal vector triad i, j, k form self reciprocal system.
(vi) If a, b, c be a system of non-coplanar vectors and a’, b’, c’ be the reciprocal system of
vectors, then any vector r can be expressed as r = (r * a’ )a + (r * b’)b + (r * c’)c.
Let a, b, c,… be vectors and x, y, z, … be scalars, then the expression x a yb + z c + … is called a linear combination of vectors a, b, c,….
The necessary and sufficient condition that three points with PV’s b, c are collinear is that there exist three scalars x, y, z not all zero such that xa + yb + zc ⇒ x + y + z = 0.
The necessary and sufficient condition that four points with PV’s a, b, c, d are coplanar, if there
exist scalar x, y, z, t not all zero, such that xa + yb + zc + td = 0 rArr; x + y + z + t = 0.
If r = xa + yb + zc…
Then, the vector r is said to be a linear combination of vectors a, b, c,….
(i) The system of vectors a, b, c,… is said to be linearly dependent, if there exists a scalars x, y,
z, … not all zero, such that xa + yb + zc + … = 0.
(ii) The system of vectors a, b, c, … is said to be linearly independent, if xa + yb + zc + td = 0
rArr; x + y + z + t… = 0.
(i) Two non-collinear vectors a and b are linearly independent.
(ii) Three non-coplanar vectors a, b and c are linearly independent.
(iii) More than three vectors are always linearly dependent.
Let a and b be any two non-collinear vectors, then any vector r coplanar with a and b, can be uniquely expressed as r = x a + y b, where x, y are scalars and x a, y b are called components of vectors in the directions of a and b, respectively.
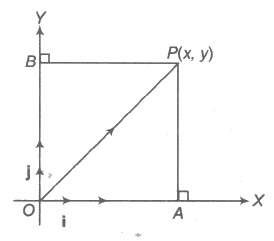
∴ Position vector of P(x, y) = x i + y j.
OP2 = OA2 + AP2 = |x|2 + |y|2 = x2 + y2
OP = √x2 + y2. This is the magnitude of OP.
where, x i and y j are also called resolved parts of OP in the directions of i and j, respectively.
(i) Vector equation of the straight line passing through origin and parallel to b is given by r = t
b, where t is scalar.
(ii) Vector equation of the straight line passing through a and parallel to b is given by r = a + t
b, where t is scalar.
(iii) Vector equation of the straight line passing through a and b is given by r = a + t(b – a),
where t is scalar.
(iv) Vector equation of the plane through origin and parallel to b and c is given by r = s b + t c,
where s and t are scalars.
(v) Vector equation of the plane passing through a and parallel to b and c is given by r = a + sb
+ t c, where s and t are scalars.
(vi) Vector equation of the plane passing through a, b and c is r = (1 – s – t)a + sb + tc, where s
and t are scalars.
(i) The bisectors of the angle between the lines r = λa and r = μb are given by r = &lamba; (a /
|a| &plumsn; b / |b|)
(ii) The bisectors of the angle between the lines r = a + λb and r = a + μc are given by r = a + &lamba; (b / |b| &plumsn; c / |c|).

Copyright @ ncerthelp.com A free educational website for CBSE, ICSE and UP board.



